AI_NavigationMesh Class Reference
[InExIn]
#include <AI_NavigationMesh.h>
Detailed Description
Navigation mesh for agent pathfinding.
Navigation mesh (navmesh) represents surface along which the agents could walk. Navmesh is constructed from vertices, triangles and edges. Triangles and border edges are using clockwise order of vertices and navmesh is in right handed coordinate system. Each border edge must have exactly two adjacent edges. Navmesh should not contain duplicate vertices.
Once the navmesh is built up then it must be preprocessed before it is used to find some way. You can also enable or disable wide agents support. When this option is turned off then pathfinding is significantly faster in navmeshes with high local complexity.
Navigation mesh should be as easy as possible due to performance issues. This requirement considers two basic rules:
- Small number of triangles
- Navigation mesh should contains as little inner vertices as possible (inner vertex is vertex that is not part of border edge).
- Navigation mesh should contains as little collinear adjacent border edges as possible (typically one edge of navmesh polygon is made by several triangle edges).
- Small local complexity.
- Navigation mesh souldn't contains too many small obstacles in large area (typical example is forest with trees). Each concave corner in navigation mesh results to one node in A* graph so too many little obstacles makes A* graph too complex and to heavy for searching. Small obstacles (no mather if they are static or not) should be solved as AI_Obstacle.
- Navigation mesh shouldn't contains too many small corners.
It is clear that both these rules couldn't be adhere at 100% but the creator of the navmesh shoud keep these rules in his mind.
Navigation mesh of course should be meaningfull. It should represents compat area.
- It MUST NOT contains edges with less then one or more then two adjacent triangles.
- It MUST NOT contains duplicate vertices, edges or triangles.
- It MUST NOT contains only vertices that are contained by no ro exactly two border edges.
- It MUST NOT contains endless band - 2d projection of triangles intersects and these triangles are part of loop (for example navmesh could not be sphere or centrifuge).
Here are examples of navigation meshes:
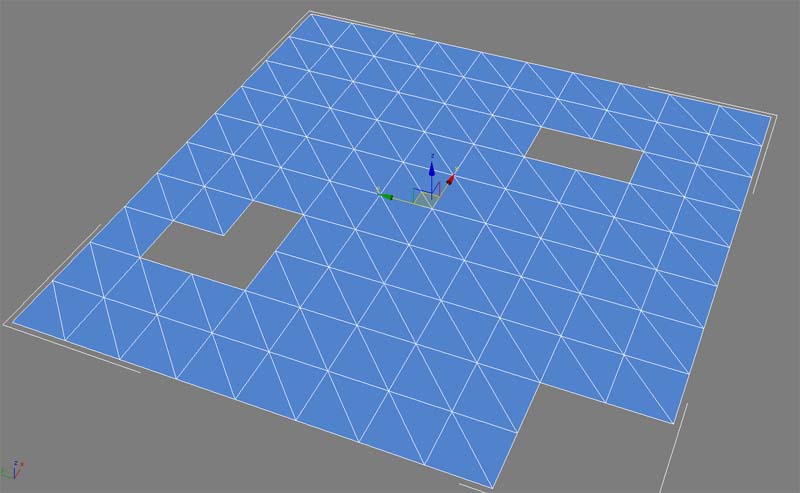
Example of inadvisable navigation mesh

Example of inadvisable navigation mesh
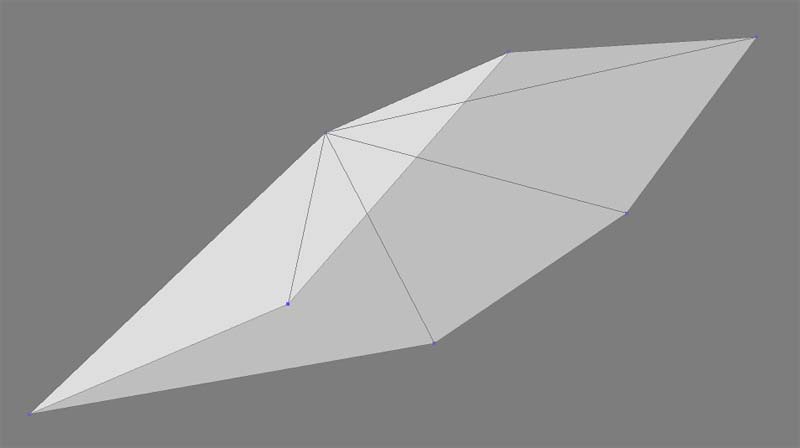
Example of totaly wrong navigation mesh
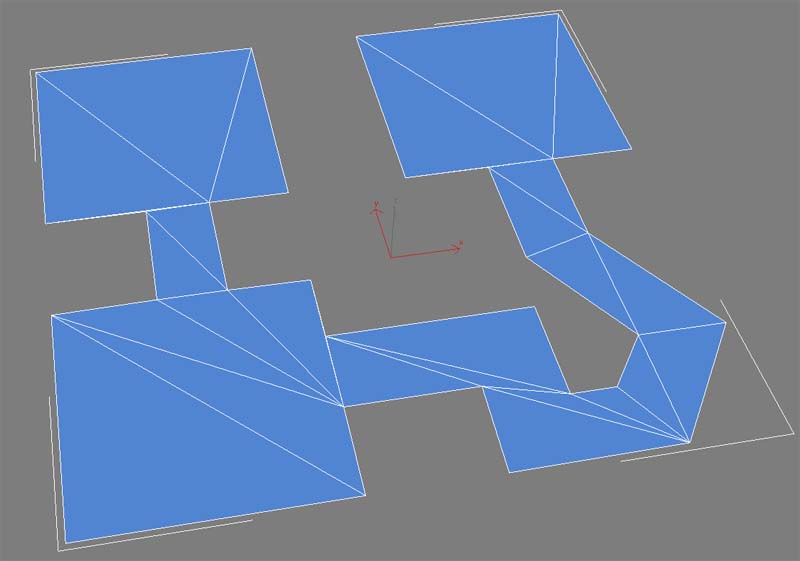
Example of fine navigation mesh
KNOWN BUGS:
1) PROBABLY SOLVED IN 1.25: If agent is standing exactly on the corner and finish is visible from agent's standing point then founded way is not shortest way.
2) PROBABLY SOLVED IN 1.25: If wide agents is turned on and agent is standing near to any corner then it sometimes go to this corner first instead to go to visible corner in direction of final point.
- Version:
- 1.25 (11.1.2007)
- bug fixed: singularity in ray-edge intersection solved
1.21 (18.8.2006)
- bug fixed in clear()
1.2 (21.10.2005)
- Internal structures (Vertex, Triangle...) are pointer based (instead of index based)
- Navigation mesh session
- findWay() gain session as only parameter
1.0 Initial release.
Public Types | |
| enum | { INVALID_INDEX = 0xffff } |
| typedef AI_Array< Vertex * > | VertexArray |
| Array of vertices. | |
| typedef VertexArray::iterator | VertexArrayIt |
| Iterator to array of vertices. | |
| typedef AI_Array< Edge * > | EdgeArray |
| Array of edges. | |
| typedef EdgeArray::iterator | EdgeArrayIt |
| Iterator to array of edges. | |
| typedef AI_Array< Triangle * > | TriangleArray |
| Array of triangles. | |
| typedef TriangleArray::iterator | TriangleArrayIt |
| Iterator to array to triangles. | |
| typedef AI_Array< Corner * > | CornerArray |
| Array of corners. | |
| typedef CornerArray::iterator | CornerArrayIt |
| Iterator to array of corners. | |
Public Member Functions | |
| AI_NavigationMesh (void) | |
| Deafult constructor. | |
| ~AI_NavigationMesh (void) | |
| Destructor. | |
| ai_index | addVertex (const AI_Vector3 &v_vertex) |
| Add vertex into navigation mesh. | |
| ai_index | addTriangle (ai_index i_v1, ai_index i_v2, ai_index i_v3) |
| Add triangle into navigation mesh. | |
| ai_index | addEdge (ai_index i_t1, ai_index i_t2, ai_index i_v1, ai_index i_v2) |
| Add edge into navigation mesh. | |
| Vertex * | getVertex (ai_index i) const |
| Return vertex by index. | |
| Triangle * | getTriangle (ai_index i) const |
| Return triangle by index. | |
| Edge * | getEdge (ai_index i) const |
| Return edge by index. | |
| bool | preprocess (void) |
| Preprocess navigation mesh. | |
| bool | findWay (Session &session) |
| Find a way between start and final positions. | |
| bool | testVisibility (const AI_Vector3 &v_first, const AI_Vector3 &v_second) |
| Test direct visibility between two points. | |
| const bool | testBorderIntersection (const AI_Vector3 &v_first, const AI_Vector3 &v_second, float &f_distance) |
| Test whether line between two points intersects the border. | |
| void | clear (void) |
| Destroy all data in navigation mesh. | |
| const AI_AStar & | getVisibilityGraph (void) const |
| Return visiblity graph associated with navigation mesh. | |
| void | setWideAgents (bool b_support=true) |
| Turn on/of wide agents support. | |
| bool | isWideAgents (void) const |
| Test if wide agents are supported. | |
| bool | isPreprocessed (void) const |
| Test if navigation mesh was successfully preprocessed. | |
| Triangle * | identifyTriangle (const AI_Vector3 &v_coord) |
| Return nearest triangle to position. | |
| bool | getNearestPosition (const AI_Vector3 &v_position, float width, bool cylinder, AI_Vector3 &v_nearest_position) |
| Return nearest position on navigation mesh to given position and width, which defines sphere or infinite Y axis aligned cylinder - depending on state of cylinder parameter. | |
Protected Attributes | |
| VertexArray | m_arr_vertices |
| Vertices. | |
| TriangleArray | m_arr_triangles |
| Triangles. | |
| EdgeArray | m_arr_edges |
| Edges. | |
| CornerArray | m_arr_corners |
| Corners. | |
| AI_SDB_SpatialAABBTree | m_spatial_tree |
| Spatial tree with all triangles. | |
| AI_SDB_VisibilityVisitor::VisibleElements | m_spatial_elements |
| Pointers to all spatial elements (bboxes with pointers to triangles). | |
| AI_SDB_VisibilityVisitor::VisibleElements | m_visible_elements |
| Array of selected visible elements. | |
| AI_AStar | m_astar |
| A* algorithm and graph. | |
| Informator | m_astar_informator |
| A* informator. | |
| bool | m_b_preprocessed |
| Preprocessed flag. | |
| bool | m_b_wide_agents |
| Support wide agents flag. | |
Classes | |
| struct | Bundle |
| class | Corner |
| class | Edge |
| class | Informator |
| class | PointVisitor |
| class | Session |
| class | Triangle |
| class | Vertex |
Member Typedef Documentation
| typedef AI_Array<Vertex*> AI_NavigationMesh::VertexArray |
Array of vertices.
Iterator to array of vertices.
| typedef AI_Array<Edge*> AI_NavigationMesh::EdgeArray |
Array of edges.
Iterator to array of edges.
| typedef AI_Array<Triangle*> AI_NavigationMesh::TriangleArray |
Array of triangles.
Iterator to array to triangles.
| typedef AI_Array<Corner*> AI_NavigationMesh::CornerArray |
Array of corners.
Iterator to array of corners.
Member Enumeration Documentation
Constructor & Destructor Documentation
| AI_NavigationMesh::AI_NavigationMesh | ( | void | ) |
Deafult constructor.
| AI_NavigationMesh::~AI_NavigationMesh | ( | void | ) |
Destructor.
Member Function Documentation
| ai_index AI_NavigationMesh::addVertex | ( | const AI_Vector3 & | v_vertex | ) |
Add vertex into navigation mesh.
| ai_index AI_NavigationMesh::addTriangle | ( | ai_index | i_v1, | |
| ai_index | i_v2, | |||
| ai_index | i_v3 | |||
| ) |
Add triangle into navigation mesh.
| ai_index AI_NavigationMesh::addEdge | ( | ai_index | i_t1, | |
| ai_index | i_t2, | |||
| ai_index | i_v1, | |||
| ai_index | i_v2 | |||
| ) |
Add edge into navigation mesh.
- Parameters:
-
i_t1 Index of the first adjacent triangle of winged edge. i_t2 Index of the second adjacent triangle of winged edge. i_v1 Index of the first vertex of the edge. i_v2 Index of the second vertex of the edge.
| AI_NavigationMesh::Vertex * AI_NavigationMesh::getVertex | ( | ai_index | i | ) | const [inline] |
Return vertex by index.
| AI_NavigationMesh::Triangle * AI_NavigationMesh::getTriangle | ( | ai_index | i | ) | const [inline] |
Return triangle by index.
| AI_NavigationMesh::Edge * AI_NavigationMesh::getEdge | ( | ai_index | i | ) | const [inline] |
Return edge by index.
| bool AI_NavigationMesh::preprocess | ( | void | ) |
Preprocess navigation mesh.
Prepare data, check well constructed mesh and build graph for A*.
| bool AI_NavigationMesh::findWay | ( | AI_NavigationMesh::Session & | session | ) |
Find a way between start and final positions.
Vectors must not be exactly on navigation mesh surface but they should be as near as possible in case when there is more then one navigation mesh floor. Path is stored in a session could be retrieved through getWay() method.
| bool AI_NavigationMesh::testVisibility | ( | const AI_Vector3 & | v_first, | |
| const AI_Vector3 & | v_second | |||
| ) |
Test direct visibility between two points.
| const bool AI_NavigationMesh::testBorderIntersection | ( | const AI_Vector3 & | v_first, | |
| const AI_Vector3 & | v_second, | |||
| float & | f_distance | |||
| ) |
Test whether line between two points intersects the border.
- Parameters:
-
v_first First point of line segment (must lie on navigation mesh) v_second Second point of tested line segment (need not to lie on navigation mesh) f_distance If method returns true then third patameter contains distance from the first point in which the line intersects border.
- Returns:
- Return true if line segment intersects border. Return false if line segment doesn't intersect border (f_distance is set to infinity) or if first point doesn't lie on navigation mesh (f_distance is set to 0).
| void AI_NavigationMesh::clear | ( | void | ) |
Destroy all data in navigation mesh.
| const AI_AStar & AI_NavigationMesh::getVisibilityGraph | ( | void | ) | const [inline] |
Return visiblity graph associated with navigation mesh.
| void AI_NavigationMesh::setWideAgents | ( | bool | b_support = true |
) | [inline] |
Turn on/of wide agents support.
| bool AI_NavigationMesh::isWideAgents | ( | void | ) | const [inline] |
Test if wide agents are supported.
| bool AI_NavigationMesh::isPreprocessed | ( | void | ) | const [inline] |
Test if navigation mesh was successfully preprocessed.
| AI_NavigationMesh::Triangle * AI_NavigationMesh::identifyTriangle | ( | const AI_Vector3 & | v_coord | ) |
Return nearest triangle to position.
| bool AI_NavigationMesh::getNearestPosition | ( | const AI_Vector3 & | v_position, | |
| float | width, | |||
| bool | cylinder, | |||
| AI_Vector3 & | v_nearest_position | |||
| ) |
Return nearest position on navigation mesh to given position and width, which defines sphere or infinite Y axis aligned cylinder - depending on state of cylinder parameter.
Member Data Documentation
VertexArray AI_NavigationMesh::m_arr_vertices [protected] |
Vertices.
TriangleArray AI_NavigationMesh::m_arr_triangles [protected] |
Triangles.
EdgeArray AI_NavigationMesh::m_arr_edges [protected] |
Edges.
CornerArray AI_NavigationMesh::m_arr_corners [protected] |
Corners.
Spatial tree with all triangles.
Pointers to all spatial elements (bboxes with pointers to triangles).
Array of selected visible elements.
AI_AStar AI_NavigationMesh::m_astar [protected] |
A* algorithm and graph.
Informator AI_NavigationMesh::m_astar_informator [protected] |
A* informator.
bool AI_NavigationMesh::m_b_preprocessed [protected] |
Preprocessed flag.
bool AI_NavigationMesh::m_b_wide_agents [protected] |
Support wide agents flag.
The documentation for this class was generated from the following files: